Intelligente Lagerroboter sind Roboter, die entwickelt wurden, um die Regalbestückung, Sortierung und Integration von großen Lagern durchzuführen. Das Produkt realisiert tatsächlich den „Regal zu Person“-Betriebsmodus, der hauptsächlich aus dem Roboterkörper und visuellen Navigationssensoren besteht. Der intelligente Lagerroboter kann die Regale voll von Waren oder Bücher anheben und die Regale schnell und reibungslos an den festgelegten Ort transportieren. Nachdem der Vorgang abgeschlossen ist, stellt der Lagerroboter das Regal an den dafür festgelegten Ort, um die nächste Aufgabe durchzuführen.
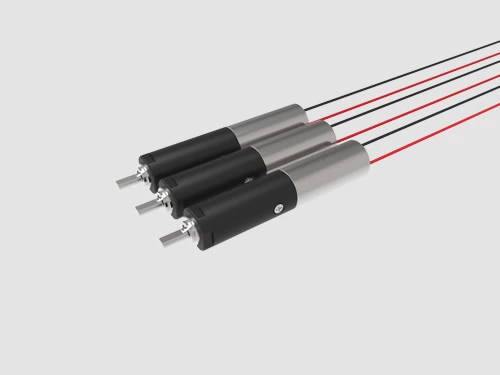
Die Waren in den Regalen können durch die Planung der Konsole sortiert werden, und ähnliche Produkte können im selben Regal zusammengestellt werden, was die Lieferzeit der Waren verkürzen und die Effizienz erheblich erhöhen kann. Der Elektromotoren für Lager ist ein Getriebemotor, der für die Übertragung, handhabung und Sortierung im modernen intelligenten Logistiklagersystem eingesetzt werden kann. Er hat die Vorteile von großer Antriebskraft, höherer Geschwindigkeit, stabilem Betriebs und geringen Geräuschen. Der Roboterwagen verwendet Servoantrieb der Niederspannung mit schneller Reaktion, der die Sortierzeit verkürzt.

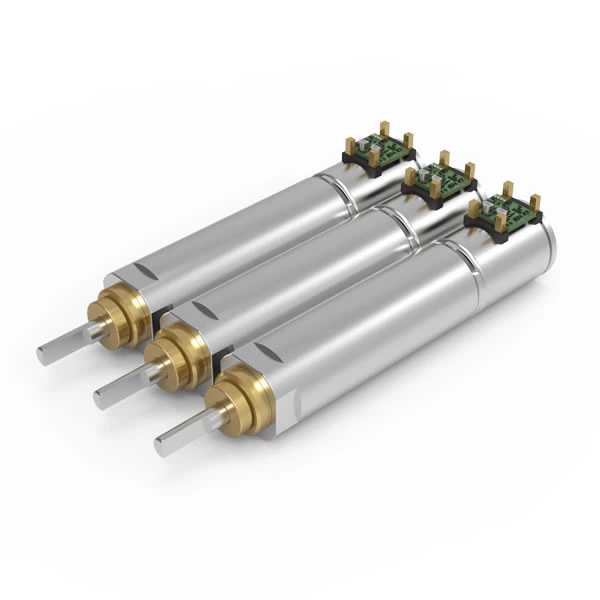
Das Hauptübertragungssystem für das Lager mit Mikromotoren besteht aus einem Antriebsmotor (Mikromotor) und einem Getriebe (Untersetzungsgetriebe). Ein bürstenbehafteter DC-Motor, ein bürstenloser DC-Motor, ein Schrittmotor, ein eisenloser Motor, ein Servomotor können als Antriebsquelle verwendet werden und ein Encoder kann ebenfalls installiert werden. Das Planetengetriebe, ein Kunststoffgetriebe oder ein Metallgetriebe, Schneckengetriebe, Parallelwellengetriebe, Zylindergetriebe können als Untersetzungsgetriebe verwendet werden. Parameter wie Ausgangsleistung, Abtriebsdrehzahl, Untersetzungsverhältnis, Abtriebsdrehmoment, Nennspannung, Durchmesser, Getriebestruktur, Getriebegeräusch, Übertragungsgenauigkeit, Betriebstemperatur werden individuell entwickelt. ZHAOWEI Machinery & Electronics Co., Ltd engagiert sich für die Entwicklung und Herstellung von Getriebemotoren für Getriebemotor für Lagerroboter mit kundenspezifischen technischen Parametern (Durchmesser: 3,4 mm–38 mm, Spannung: unter 24 V, Ausgangsleistung: unter 50 W, Ausgangsdrehzahl: 5 U/min - 2000 U/m, Drehzahlverhältnis: 5-1500, Abtriebsdrehmoment: 1,0 gf.cm -50kgf.cm). Die Drehgenauigkeit des Getriebes beträgt 1-2 Bogenminuten und das Getriebegeräusch liegt unter 45 dB.
Parameter des Getriebemotor für Lagerroboter
| Material | Metall/Kunststoff |
|---|---|
| Außendurchmesser | 12mm |
| Betriebstemperaturbereich | -20℃~+85℃ |
| Drehrichtung | im Uhrzeigersinn und gegen den Uhrzeigersinn |
| Getriebespiel | ≤3° |
| Spannung | 3V~24V |
| Lager | Sinterlager/Wälzlager |
| Eingangsdrehzahl | ≤30000rpm |
| Axialspiel | ≤0,3mm/≤0,2mm |
| Current | 250mA max |
| Radiale Belastung der Abtriebswelle | ≤5N/≤10N |
| Motors | Servomotor, Schrittmotor, Gleichstrom-Bürstenmotor |
Individualisierung
Name: Getriebemotor für fahrende Roboter
Projekt-Hintergrund: Intelligente Roboter können nach vorab festgelegten Verfahren oder Programmen handeln, die durch künstliche Intelligenz eingerichtet wurden. Ausgereifte, intelligente Produkte können Menschen wie bei Fertigung, Konstruktion oder gefährliche Tätigkeiten ersetzen. Roboter werden nach Bewegungsmodus in Radtyp, Beintyp, Raupentyp, Schlangentyp und Compound-Typ unterteilt. Unter diesen nehmen fahrende roboter eine relativ wichtige Position im Bereich der autonomen mobilen Roboter ein. Sie haben die Eigenschaften der schnellen Bewegung und einfache Steuerung und werden in automatischen Palettierfließbändern, unbemannten Fahrzeugen und anderen Bereichen weitverbreitet.
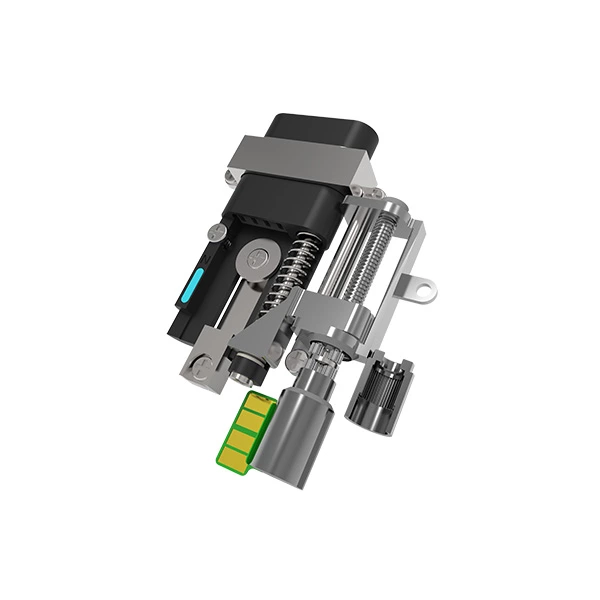
Technischer Support: Der Antriebsteil des fahrenden Roboters verwendet eine Kombination aus einem DC-Motor und einem 38-mm-Planetengetriebe sowie einer antisymmetrischen Installationsmethode. Diese Methode kann den Kraftpunkt der Abtriebswelle der bürstenloser Motoren für Roboterlager reduzieren, den Radstand detulich verkürzen und Platz sparen, wobei der Radsatz koaxial ist und mehr Leistung liefert (normalerweise sind die Motorgröße und die Leistung in einem bestimmten Verhältnis).
Leistung: Laut den Feldversuchen und theoretischen Analysen wird die schlechte Steigfähigkeit vor allem durch die unzureichende Antriebskraft des Antriebssystems verursacht. Der Grund für die fehlende Antriebskraft ist, dass der Reibungsfaktor der in der Konstruktionsphase entschiedene Linearführungsschiene allzu ideal ist. Um die Änderung des Reibfaktors der Führungsschiene nach Erhöhung der Systembelastung zu lösen, verfügt unser Planetengetriebe über ein zwei-, drei-, vierstufiges Getriebe, das die Untersetzung ändern und die Antriebsdrehzahl und das Drehmoment des Getriebes entsprechend den Anforderungen des Mikromotorlagers und des Getriebemotors für fahrenden Roboter anpassen kann.