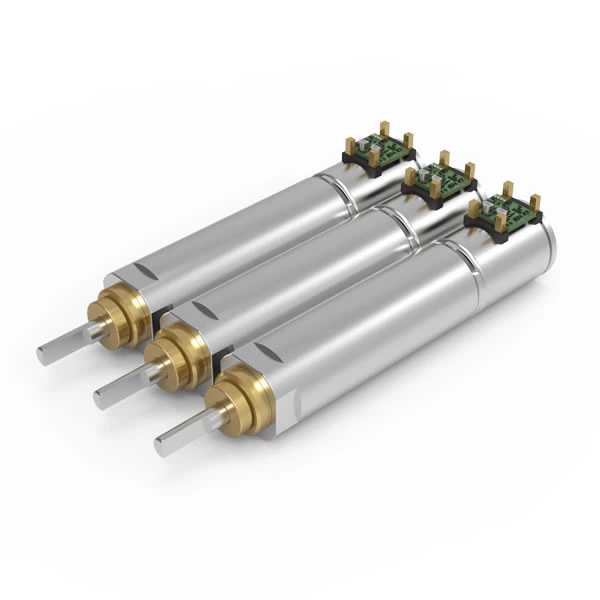
Der Motor für Roboterhund ist ein Mikrogetriebesystem, das für den intelligenten Roboterhundegelenkantrieb verwendet wird. Die Hauptgetriebestruktur besteht aus Antriebsmotor (Mikromotor) und Getriebe (Untersetzungsgetriebe). Der Motor für Roboterhundegelenk kann den Roboterhund dazu bringen, adaptiv zu gehen. Es ermöglicht dem Roboterhund, Steigungen zu überwinden und auf Schotterweg zu gehen. Gehen vorwärts, rückwärts, nach oben, nach unten, der Gierwinkel, der Nickwinkel und der Rollwinkel beim Gehen auf einer unebenen Terrasse können gesteuert werden. Diese Art von technischen Parametern muss angepasst werden, wie z.B. Ausgangsleistung, Abtriebsdrehmoment, Geräusch, Präzision, Getriebeübertragungsmodus, Antriebsmotorleistung. ZHAOWEI Machinery & Electronics Co., Ltd engagiert sich dafür, umfassende Anpassungsservice anzubieten.
Parameter des Motors für Roboterhund
| Material | Metall |
|---|---|
| Außendurchmesser | 24mm |
| Betriebstemperaturbereich | -20℃~+100℃ |
| Drehrichtung | cw&ccw |
| Getriebespiel | ≤3° |
| Spannung | 3V~24V |
| Lager | Sinterlager/Wälzlager |
| Eingangsdrehzahl | ≤15000rpm |
| Axialspiel | ≤0,3mm/≤0,2mm |
| Current | 300mA max |
| Radiale Belastung der Abtriebswelle | ≤120N/≤170N |
| Motors | Schrittmotor, Gleichstrom-Bürstenmotor |
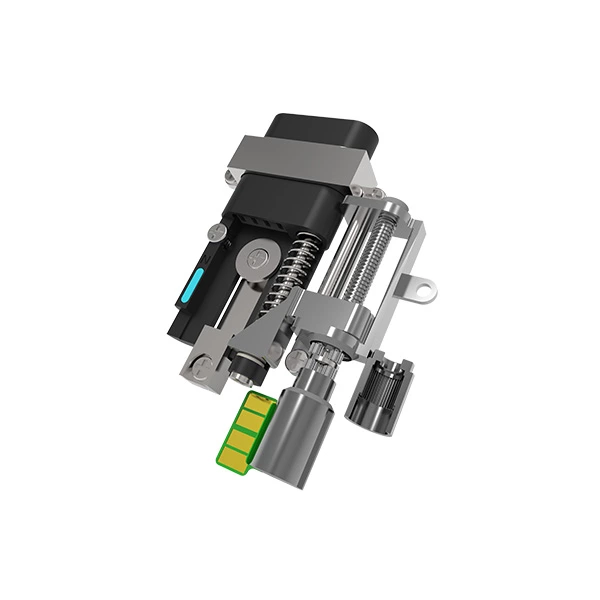
Individualisierung

Projektname: Motor für Robotergelenk
Projekt-Hintergrund: In einer schnellen Reaktion und Interaktion während der Kommunikation wird der DC-Getriebemotor für Roboter verwendet, um die Gelenke des Roboters anzutreiben, die ein großes Leistungs-Masse-Verhältnis und ein Drehmoment-Trägheits-Verhältnis, ein hohes Anlaufdrehmoment, eine geringe Trägheit und einen breiten und reibungslosen Drehzahlregelbereich erfordern. Insbesondere sollte der Robotergreifer einen Robotermotor mit einem kleinen Volumen und Masse und einer großen Überlastkapazität in kurzer Zeit verwenden.
Leistung: Der Roboter ist mit dem ZHAOWEI Planetenservomotor für Roboter kombiniert, was die Qualität und Effizienz des Roboters deutlich verbessern kann. Der DC-Gleichstrommotor für Roboter verfügt über zweistufige, dreistufige und vierstufige Getriebeschaltung. Das Untersetzungsverhältnis, die Eingangsdrehzahl und das Drehmoment des Getriebes können entsprechend den Konstruktionsanforderungen des Robotermotors angepasst werden.