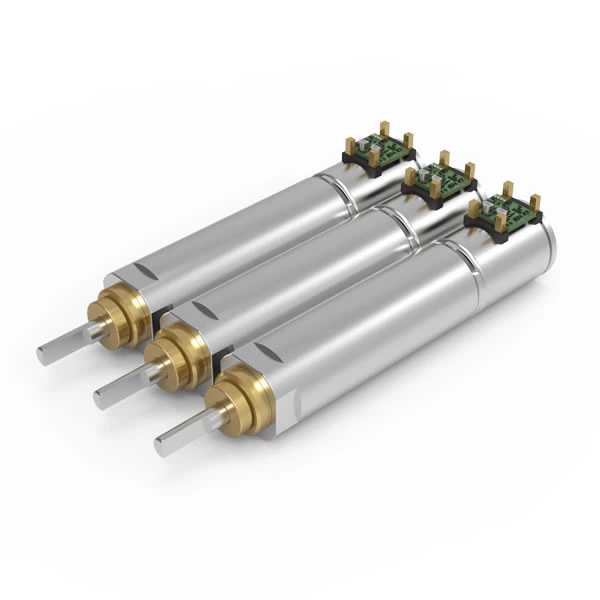
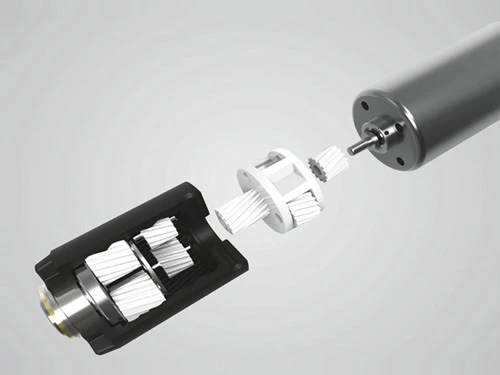
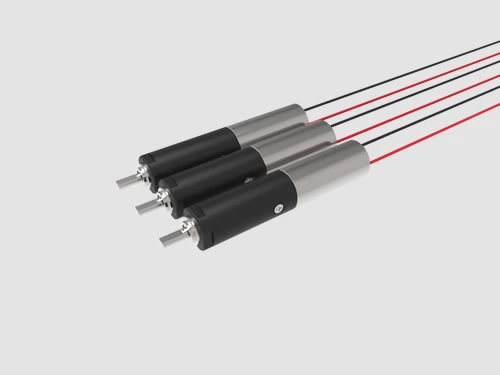
Der Getriebemotor für Roboter ist die Kombination aus Getriebe und Mini-Robotermotor, die für den intelligenten Roboter verwendet wird. Es handelt sich um ein Untersetzungsgetriebesystem bestehend aus Antriebsmotor (Mikromotor) und Getriebe (Untersetzungsgetriebe). Der Mini-Robotermotor hat die Funktion der Verzögerung und Erhöhung des Drehmoments des Robotermotors, was den Roboter zu bewegen und gehen betreiben kann. Beispielsweise kann ein bürstenbehafteter DC-Motor, ein Servomotor, ein Schrittmotor als Antriebsquelle verwendet werden und kann ein Encoder ebenfalls dabei installiert werden. Das Planetengetriebe, ein Kunststoffgetriebe oder ein Metallgetriebe, Schneckengetriebe, Parallelwellengetriebe, Zylindergetriebe können als Untersetzungsgetriebe verwendet werden. Parameter wie Ausgangsleistung, Abtriebsdrehzahl, Untersetzungsverhältnis, Abtriebsdrehmoment, Nennspannung, Durchmesser, Getriebestruktur, Getriebegeräusch, Übertragungsgenauigkeit, Betriebstemperatur werden individuell entwickelt. ZHAOWEI Machinery & Electronics Co., Ltd konzentriert sich darauf, Entwicklung Getriebemotor und Herstellung Antriebssysteme für intelligenten Roboter mit kundenspezifischen technischen Parametern anzubieten (Durchmesser: 3,4 mm–38 mm, Spannung: unter 24 V, Ausgangsleistung: unter 50 W, Ausgangsdrehzahl: 5 U/min - 2000 U/m, Übersetzungsverhältnis: 5-1500). Abtriebsdrehmoment: 1,0 gf.cm -50kgf.cm. Die Gegenreaktion des Getriebes beträgt 1–2 Bogenminuten und das Getriebegeräusch liegt unter 45 dB.
Parameter des Getriebemotors für Roboter
| Material | Metall |
|---|---|
| Außendurchmesser | 38mm |
| Betriebstemperaturbereich | -30℃~+100℃ |
| Drehrichtung | im Uhrzeigersinn und gegen den Uhrzeigersinn |
| Getriebespiel | ≤2° |
| Spannung | 3V~24V |
| Lager | Sinterlager/Wälzlager |
| Eingangsdrehzahl | ≤15000rpm |
| Axialspiel | ≤0.1mm/≤0.1mm |
| Current | 300mA max |
| Radiale Belastung der Abtriebswelle | ≤120N/≤180N |
| Motors | Servomotor, Schrittmotor, Gleichstrom-Bürstenmotor |
Individualisierung
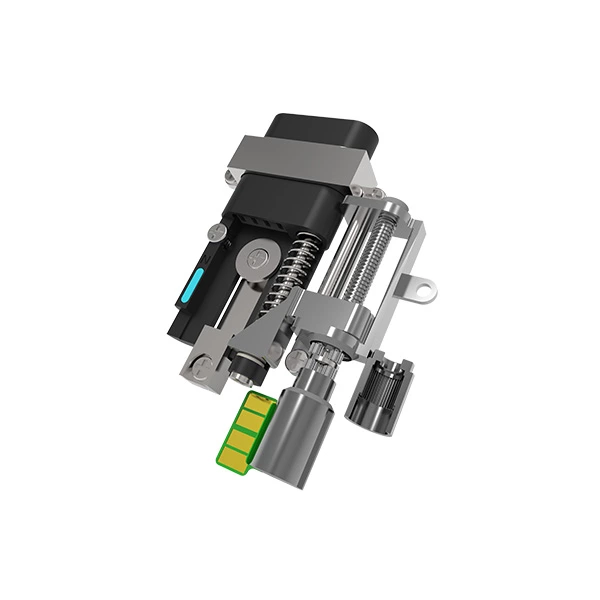
Projektname: Motor für Roboterrad
Projekt-Hintergrund: Roboter werden nach Bewegungsmodus in Radtyp, Beintyp, Raupentyp, Schlangentyp und Compound-Typ unterteilt. Unter diesen nehmen fahrende roboter eine relativ wichtige Position im Bereich der autonomen mobilen Roboter ein. Sie haben die Eigenschaften der schnellen Bewegung und einfache Steuerung und werden in automatischen Palettierfließbändern, unbemannten Fahrzeugen und anderen Bereichen weitverbreitet.
Technische Leistung: Der Antriebsteil des fahrenden Roboters verwendet eine Kombination aus einem DC-Motor und einem 38-mm-Planetengetriebe mit einer antisymmetrischen Installationsmethode. (Schrittmotor für Roboterräder ist auch ein gängiger Typ.) Diese Methode kann die Kraft der Abtriebswelle des Untersetzungsgetriebes reduzieren, den Radstand detulich verkürzen und Platz sparen, wobei der Radsatz koaxial ist und große Leistung gebraucht ist (normalerweise ist die Motorgröße und die Leistung in einem bestimmten Verhältnis). Dadurch kann der Motor für Roboterrad klein sein.