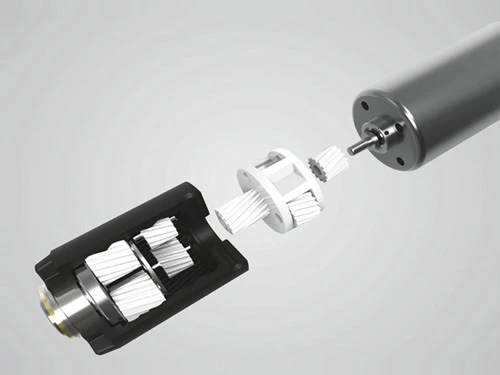
Da es so viele Arten von Getriebemotoren gibt, kann man leicht verwirrt werden, wenn man darüber spricht. Wenn es um kleine Getriebemotoren geht, müssen wir einige Grundlagen kennen, um sie unterscheiden zu können. Für den Anfang ist der Mikrogetriebemotor eine Kombination aus einem Mikrogetriebe (Untersetzungsgetriebe) und einem Elektromotor. Mit diesem Untersetzungssystem kann der Getriebemotor für Anwendungen mit niedriger Drehzahl und hohem Drehmoment verwendet werden. Basierend auf dem verwendeten Motor können Getriebemotoren in kleine bürstenlose Gleichstrommotoren, kleine bürstenbehaftete Gleichstrommotoren, Mikroschrittgetriebemotoren, Servogetriebemotoren und mehr eingeteilt werden. Aber was sind ihre Unterschiede? In dieser Passage werden diese ähnlichen Getriebemotoren verglichen und im Detail erläutert. Unterschiede werden in Sätzen beschrieben; kleine bürstenbehaftete DC-Getriebemotoren und kleine bürstenlose DC-Getriebemotoren sowie kleine Schrittgetriebemotoren und kleine Servo-Getriebemotoren.

Kleine bürstenbehaftete DC-Getriebemotoren im Vergleich zu kleinen bürstenlosen DC-Getriebemotoren
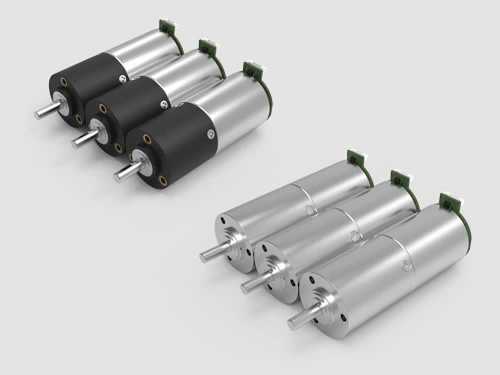
Der Hauptunterschied zwischen einem kleinen bürstenbehafteten DC-Getriebemotor und einem kleinen bürstenlosen DC-Getriebemotor liegt im Motor: Der eine hat eine Bürste und der andere nicht. Definitionen und Arbeitsprinzipien finden Sie im Artikel mit dem Titel Brushless VS Brushed Motor: Was ist der Unterschied. Diese Passage wird sich auf die markanten Unterschiede konzentrieren.
1. Anwendungsbereich
Bürstenlose DC-Getriebemotoren werden normalerweise für Geräte mit relativ hohen Steuerungsanforderungen und relativ hoher Geschwindigkeit verwendet, wie beispielsweise Flugzeugmodelle und Präzisionsinstrumente, die höhere Anforderungen an die Motordrehzahl und Hochgeschwindigkeitssteuerung stellen. Kleine Gleichstrommotoren mit Bürsten werden normalerweise für Leistungsgeräte wie Haartrockner und Haushaltsdunstabzugshauben verwendet. Darüber hinaus können bürstenbehaftete Gleichstrommotoren höhere Drehzahlen erreichen. Aufgrund des Verschleißes der Kohlebürsten ist die Lebensdauer von Bürstenmotoren jedoch nicht so hoch wie bei bürstenlosen Motoren.

2. Lebensdauer
Kleine bürstenlose DC-Motoren: Die Lebensdauer beträgt mehrere zehntausend Stunden, kann jedoch aufgrund unterschiedlicher Lagerungen abweichen.
Kleine Gleichstrommotoren mit Bürsten: Im Allgemeinen beträgt die kontinuierliche Lebensdauer eines Bürstenmotors etwa 1.000 Stunden. Wenn die Einsatzgrenze erreicht ist, muss die Kohlebürste ersetzt werden, da sonst Lagerverschleiß entsteht.
3. Wirkung
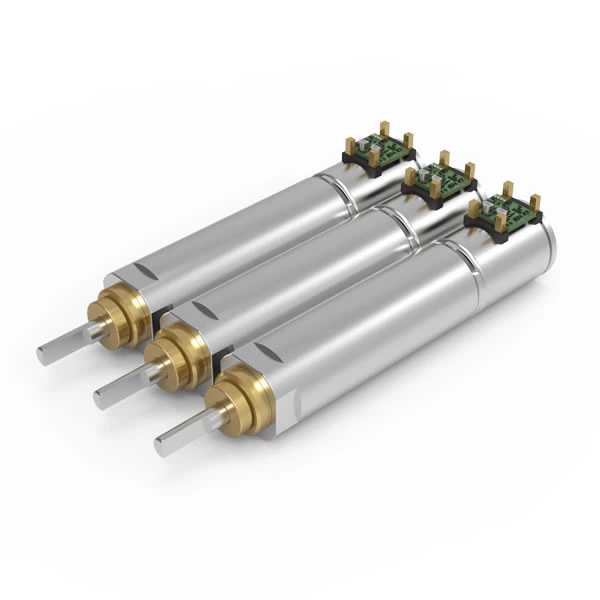
Kleine bürstenlose Gleichstrommotoren: Im Allgemeinen wird eine digitale Frequenzumwandlungssteuertechnologie verwendet, die eine starke Steuerbarkeit ermöglicht. Die Geschwindigkeit kann von wenigen Umdrehungen pro Minute bis zu Zehntausenden Umdrehungen pro Minute variieren.
Kleine Gleichstrommotoren mit Bürsten: Der alte Kohlebürstenmotor arbeitet nach dem Start in der Regel mit konstanter Drehzahl und die Drehzahlanpassung ist nicht einfach. Auch bürstenbehaftete Gleichstrommotoren können 20.000 U/min erreichen, jedoch ist die Lebensdauer relativ kurz.
4. Energie sparen
Relativ gesehen sparen bürstenlose Motoren, die mit Invertertechnologie gesteuert werden, viel mehr Energie als bürstenbehaftete Gleichstrommotoren.
5. Wartung
Die Kohlebürste muss nach längerem Gebrauch ausgetauscht werden, und Bürstenmotoren werden beschädigt, wenn sie nicht schnell ausgetauscht werden. Bürstenlose Motoren haben eine relativ lange Lebensdauer, in der Regel mehr als das 10-fache der von Bürstenmotoren. Bürstenlose Gleichstrommotoren erfordern keine tägliche Wartung. Wenn sie brechen, muss der Motor ersetzt werden.
Kleine Schrittgetriebemotoren vs. kleine Servogetriebemotoren
1. Steuerungsmethode
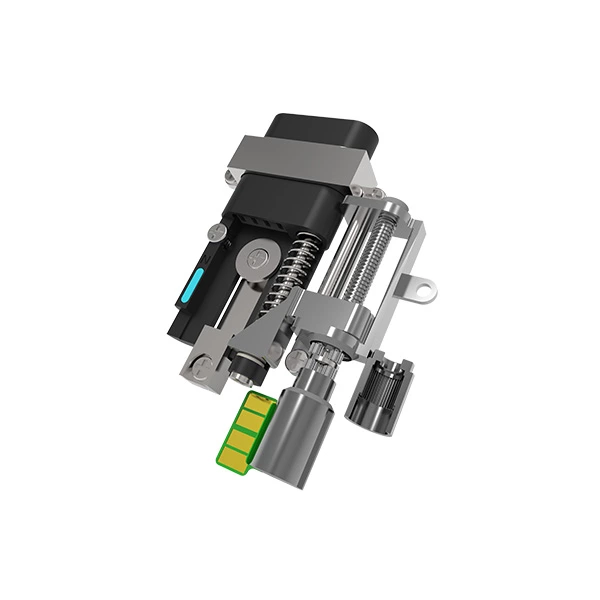
Die Steuerungsmethoden von Schrittgetriebemotoren und Servogetriebemotoren sind unterschiedlich. Bei Mikrometall-Getriebeschrittmotoren wird der Drehwinkel durch die Impulszahl bestimmt. Jeder Impuls entspricht einem Schrittwinkel. Es gibt jedoch kein Rückkopplungssignal, was dazu führt, dass die genaue Drehposition des Motors unbekannt ist und die Positionsgenauigkeit nicht hoch genug ist. Der Servo-Getriebemotor regelt den Drehwinkel ebenfalls über die Anzahl der Impulse. Was sie unterscheidet, ist ihr Feedback-Signal. Jedes Mal, wenn sich der Servomotor um einen bestimmten Winkel dreht, wird die entsprechende Anzahl von Impulsen gesendet. Gleichzeitig empfängt der Antrieb das Rückkopplungssignal und vergleicht es mit dem vom Servomotor empfangenen Impuls, sodass das System den Unterschied in der Impulsanzahl analysieren kann. Die Drehung des Motors kann sehr genau gesteuert werden, um eine genaue Positionierung zu erreichen, die 0,001 mm erreichen kann.
2. Überlastfähigkeit
Schrittmotoren haben im Allgemeinen keine Überlastfähigkeit, während ein AC-Servomotor eine starke Überlastfähigkeit hat. Nehmen Sie als Beispiel das Servosystem von Pilz. Es verfügt über Drehzahl- und Drehmomentüberlastfähigkeiten und sein maximales Drehmoment beträgt das 3-fache des Nenndrehmoments, das verwendet werden kann, um die momentane Trägheitslast im Anlaufmoment zu überwinden.
3. Reaktionszeit
Die Reaktionsgeschwindigkeitsleistung zwischen beiden Motoren ist unterschiedlich. Es dauert 200–400 ms, bis ein Mikrometall-Getriebe-Schrittmotor aus dem Stillstand auf eine Arbeitsgeschwindigkeit (in der Regel mehrere hundert Umdrehungen pro Minute) beschleunigt. Die Beschleunigungsleistung des AC-Servosystems ist besser. Nehmen Sie als Beispiel den Pilz AC-Servomotor; die Beschleunigung aus dem Stillstand auf die Nenndrehzahl von 3000 U/min dauert einige Minuten. Es kann für Anwendungen verwendet werden, bei denen schnelles Starten und Stoppen und eine hohe Positionsgenauigkeit erforderlich sind. Nachdem wir den ausführlichen Kontrast zu allgemeinen kleinen Getriebemotoren gelesen haben, hoffen wir, dass es einfacher ist, einen geeigneten Getriebemotor für Ihren spezifischen Einsatz auszuwählen. ZHAOWEI bietet verschiedene Arten von bürstenbehafteten Gleichstrommotoren, BLDC-Getriebemotoren, Servo-Getriebemotoren und Schrittgetriebemotoren mit unterschiedlichen Spezifikationen an. Parameter wie Durchmesser, Spannung, Geschwindigkeit, Untersetzungsverhältnis können angepasst werden.