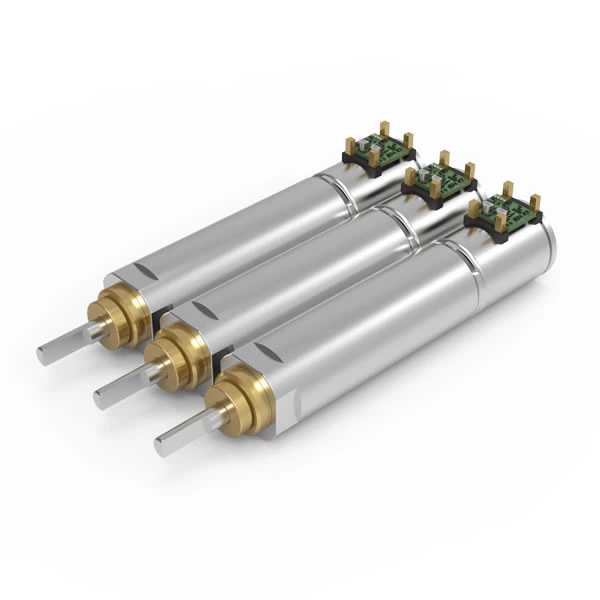
Der Getriebeschrittmotor ist eine häufit verwendete Verzögerungseinrichtung, wobei der 12V Getriebeschrittmotor am gebräuchlichsten ist. In diesem Artikel werden Schrittmotoren, Untersetzungsgetriebe, Schrittgetriebemotoren und deren Strukturen im Detail vorgestellt. Der Schrittmotor ist ein Sensormotor. Sein Arbeitsprinzip besteht darin, mit einer elektronischen Schaltung Gleichstrom in einen mehrphasigen sequenziellen Steuerstrom umzuwandeln. Mit diesem Strom kann der Schrittmotor in üblicher Weise arbeiten. Der Antrieb ist ein mehrphasiger sequenzieller Controller, der eine Timesharing-Stromversorgung für den Schrittmotor bereitstellt. Der Schrittmotor ist ein Steuermotor mit Open-Loop, der elektrische Impulssignale in Winkelverschiebung oder lineare Verschiebung umwandelt. Es ist das wichtigste ausführendes Element und ist am häufichsten verwendet in modernen digitalen Programmsteuerungssystemen. Unter nicht überlastenden Zustand hängen die Motordrehzahl und die Stoppposition von der Frequenz und Impulszahl des Impulssignals ab und werden nicht durch Laständerungen beeinflusst. Nachdem der Schrittmotorantrieb das Impulssignal empfangen hat, treibt er den Schrittmotor an, sich in einem festen Winkel zu drehen, der als "Schrittwinkel" bezeichnet wird, und seine Rotation bewegt sich allmählich in einem festen Winkel.

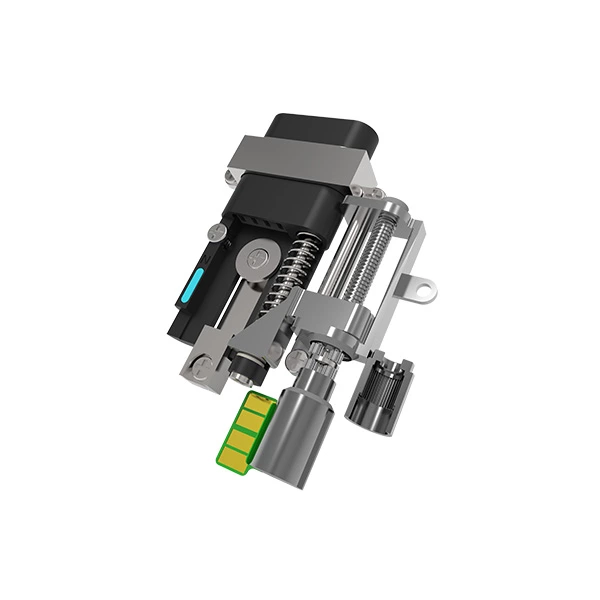
Das Untersetzungsgetriebe ist eine unabhängige Bauteil, die aus Getriebe, Schneckengetriebe und Schneckenradgetriebe besteht und in einer starren Gehäuse eingeschlossen ist. Es wird oft als Untersetzungsgetriebe zwischen den ursprünglichen beweglichen Teilen und den Arbeitsmaschinen verwendet. Es passt die Drehzahl- und Drehmomentübertragung zwischen dem Antriebsmotor und der Arbeitsmaschine oder dem Aktuator an. Es ist häufit in modernen Maschinen verwendet und wird im Allgemeinen für Getriebe mit niedriger Geschwindigkeit und hohem Drehmoment verwendet. Der Motor, der Verbrennungsmotor oder eine andere Hochgeschwindigkeitslaufleistung wird verwendet, um eine Verzögerung zu erreichen, indem das große Getriebe auf der Abtriebswelle durch ein Getriebe mit einer geringeren Anzahl von Zähnen an der Antriebswelle des Untersetzungsgetriebes gekoppelt wird. Es wird auch mehrere Getriebepaare mit dem gleichen Prinzip geben, um den gewünschten Verzögerungseffekt zu erzielen. Das Verhältnis der Zähneanzahl der großen und kleinen Getrieben ist die Übersetzungsübersetzung. Die Antriebsquelle des Untersetzungsgetriebes kann ein Gleichstrommotor, ein Schrittmotor, ein eisenloser Motor oder ein Mikromotor sein. Diese Art von Verzögerungsausrüstung wird auch als DC-Getriebemotor, Schrittgetriebemotor, eisenloser Getriebemotor oder Mikrogetriebemotor bezeichnet.
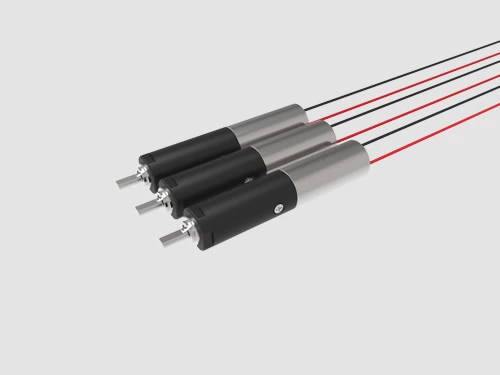
Der Getriebeschrittmotor besteht aus einem Untersetzungsgetriebe (Getriebe) und einem Motor. Der Motor kann eine beträchtlich hohe Drehzahl liefern, aber das Drehmoment ist niedrig und erzeugt somit eine recht hohe Bewegungsträgheit. Der Untersetzungsgetriebe soll die Geschwindigkeit reduzieren. Die Erhöhung des Drehmoments und die Verringerung der Bewegungsträgheit haben die erforderliche Drehzahl und das erforderliche Drehmoment erreicht. Kurz gesagt, ein Schrittmotor kann mit einer festen Länge und Drehzahl gesteuert werden. Der Unterschied zwischen einem Schrittmotor und einem Getriebeschrittmotor besteht darin, dass der Schrittmotor eine konstante Drehzahl und Pünktlichkeit erreichen kann (seine Dauer und Drehzahl können eingestellt werden). Die Drehzahl des Getriebeschrittmotors wird jedoch durch das Untersetzungsverhältnis bestimmt, kann nicht eingestellt werden und ist mit hocher Drehzahl. Der Schrittmotor hat ein geringes Drehmoment, während der Schrittgetriebemotor ein großes Drehmoment hat.