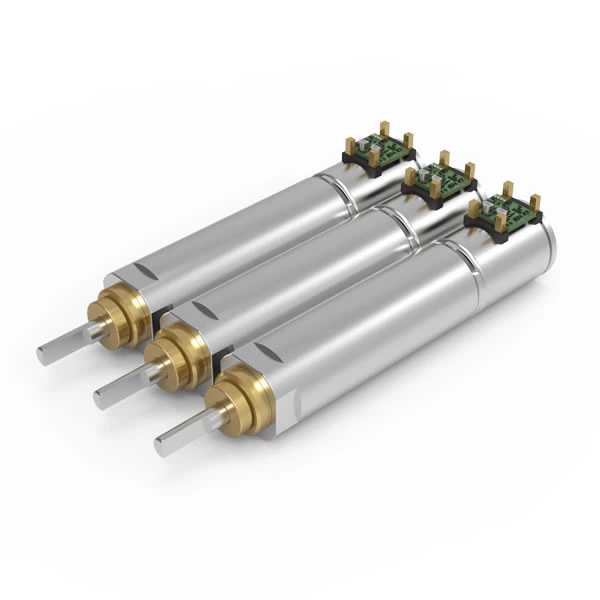
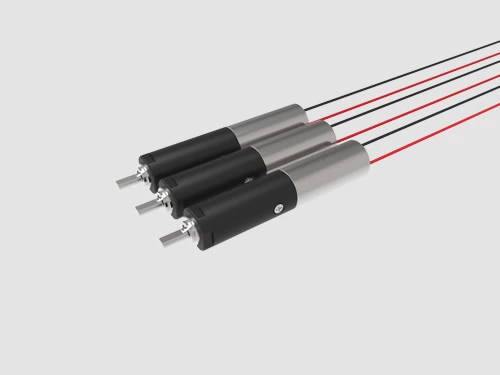
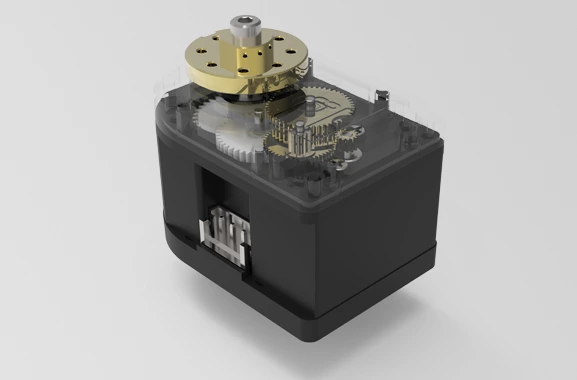
Ein Servomotor besteht aus einem Mikromotor, einem Satz Untersetzungsgetriebe, einem Potentiometer (das als Positionssensor mit dem Untersetzungsgetriebe verbunden ist) und einer Steuerung (in der Regel mit Spannungskomparator, Eingangssignal und Stromversorgung).
Wie unterscheiden sich Servomotoren von Schrittmotoren?
Ein Servomotor ist ein System bestehend aus Mikromotoren (normalerweise Schrittmotoren und bürstenlosen Motoren) und verschiedenen Komponenten. Wenn elektrische Impulse an die Statorspulen angelegt werden, erzeugt der Schrittmotor ein Magnetfeld, um den Permanentmagnetrotor anzuziehen. Der Fehler des Servomotors ist im Allgemeinen klein. Da die Leistung des Mikroservomotors vom Mikromotor stammt, muss eine Steuerung vorhanden sein, die Befehle an den Mikromotor ausgibt. Das Servomotorsystem sollte auch gleichzeitig eine Rückkopplungssteuerung aufweisen.
Prinzip
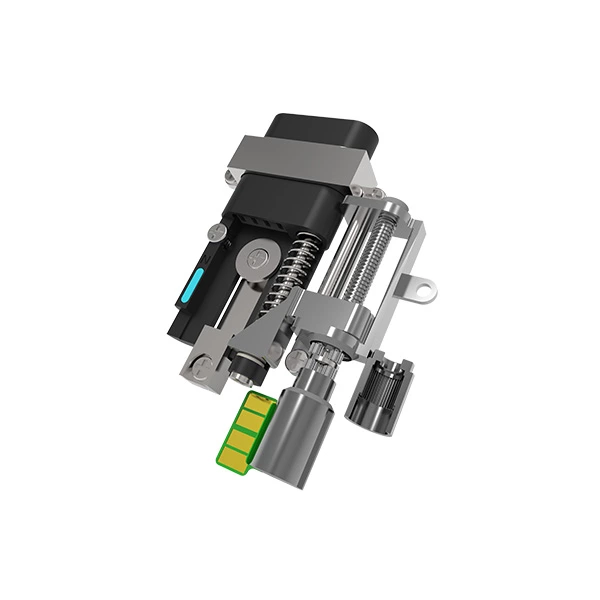
Das Abtriebsrad des internen Untersetzungsgetriebes des Servosystems ist mit einem Potentiometer verbunden, um einen Positionssensor zu bilden. Der Drehwinkel dieses Servomotorsystems wird daher durch den Drehwinkel des Potentiometers beeinflusst. Die beiden Enden des Potentiometers sind mit dem Plus- und Minuspol der Stromversorgung verbunden, und das Gleitende ist mit der rotierenden Welle verbunden. Der Schieber dreht sich mit der Welle, wodurch sich die Spannung zwischen dem Schieberende des Potentiometers und dem negativen Ende der Stromversorgung mit der Drehung der Welle ändert. Diese Spannung ist die Eingangsspannung des Spannungskomparators (Operationsverstärker). Das Steuersignal wird zusammen mit der Eingangsspannung an den Operationsverstärker gesendet. Das Eingangssteuersignal ist ein Pulsweitenmodulationssignal (PWM), und die durchschnittliche Spannung ändert sich proportional zur hohen Spannung in einer mittleren Periode.
Steuern der Richtung des Mikromotors
Vergleichen Sie zunächst die durchschnittliche Spannung des Eingangssignals mit der Spannung des Leistungspositionssensors. Wenn die Eingangsspannung höher als die Spannung des Leistungspositionssensors ist, gibt der Verstärker eine positive Versorgungsspannung aus. Wenn die Eingangsspannung niedriger als die Positionssensorspannung ist, gibt der Verstärker eine negative Versorgungsspannung aus. Das ist eine umgekehrte Spannung. Auf diese Weise werden die CW- und CCW-Richtungen des Mikromotors gesteuert, und das Servosystem wird durch den Untersetzungsgetriebesatz gesteuert. Wenn das Potentiometer und die Abtriebszahnradkupplung nicht gebunden sind, können sie mit anderen Wellen des Untersetzungsgetriebesatzes gekoppelt werden, um das Übersetzungsverhältnis zu steuern, um einen größeren Bereich des Servosystems zu erreichen, einschließlich einer 360°-Drehung. Dies kann zu größeren Fehlern führen, führt jedoch nicht zu einem kumulativen Fehler.
Breite Anwendungen
Servomotoren können auf verschiedene mechanische Arme, Roboter und automatische Türen angewendet werden. Es gibt auch spezielle drehmomentstarke und hochpräzise Servomotoren für Bereiche, die eine hohe Genauigkeit oder ein hohes Drehmoment für eine große Last erfordern. Bei der Auswahl eines Modells müssen wir dem Drehmoment Priorität einräumen. Die sorgfältige und wirtschaftliche Auswahl entsprechend den Anforderungen des Servomotorsystems ist ebenfalls unverzichtbares Wissen, das möglicherweise mehr Übung erfordert.