In der modernen Industrialisierung ist die gegenseitige Umwandlung von elektrischer Energie und mechanischer Energie weit verbreitet und notwendig geworden. Ein Getriebemotor ist ein Gerät, das elektrische Energie in mechanische Energie umwandelt. Der Getriebemotor umfasst Motor, Getriebe und Lager in einem Gehäuse; Es wird häufig in Anwendungen verwendet, die eine hohe Kraft (Drehmoment) bei niedriger Geschwindigkeit erfordern. Heutzutage werden verschiedene Geräte immer kleiner. Dementsprechend entstand der Mikrogetriebemotor. Ein Mikrogetriebemotor ist ein Getriebemotor, dessen Durchmesser in Millimetern (kleine Größe) gemessen wird und dessen Drehmoment aufgrund des Getriebes hoch ist. Mikrogetriebemotoren können basierend auf unterschiedlichen Standards in mehrere verschiedene Typen unterteilt werden. In dieser Passage werden einige häufig verwendete Mikrogetriebemotoren vorgestellt.
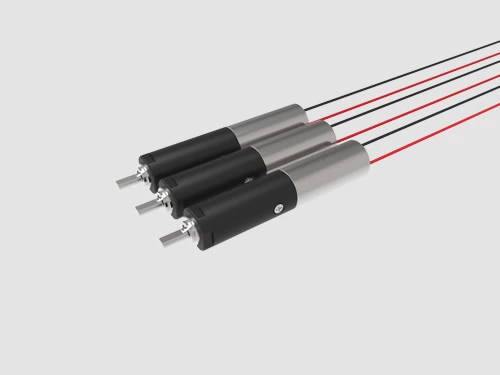
1. Mikro-DC-Getriebemotor
Ein Mikro-DC-Getriebemotor ist ein Getriebemotor, der elektrische Energie durch Gleichstrom (DC) aufnimmt und diese Energie in mechanische Rotation umwandelt. Es besteht aus einem Mikro-Gleichstrommotor und einem Zahnradsatz (Getriebe). Ein Gleichstrommotor besteht aus einem Stator und einem Rotator; es nutzt Magnetfelder, die aus den erzeugten elektrischen Strömen entstehen, die die Bewegung eines Rotors antreiben, der in der Abtriebswelle befestigt ist. Abtriebsdrehmoment und -drehzahl hängen sowohl vom elektrischen Eingang als auch vom Design des Motors ab. Mikro-DC-Getriebemotoren benötigen eine Batteriestromquelle und werden für präzise drehzahlgeregelte Anwendungen wie Rollstühle, Krankenhausbetten, Aufzüge und medizinische Tische, elektrisch verstellbare Sitze und andere Automobilanwendungen verwendet.
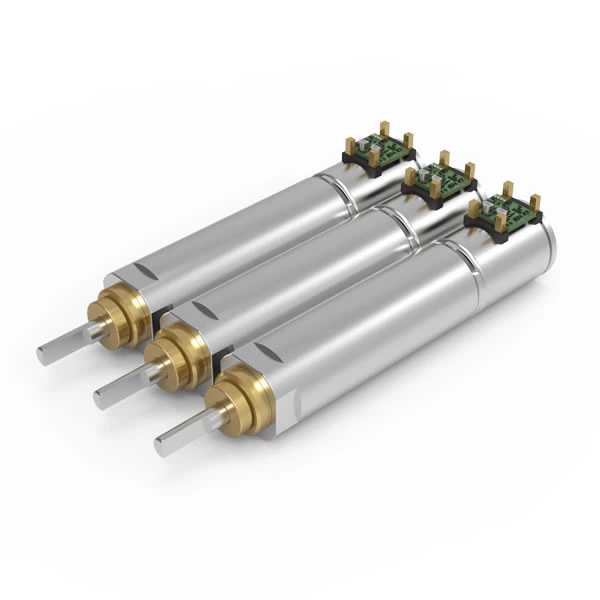
2. Bürstenloser Miniatur-DC-Motor
Da Gleichstrommotoren normalerweise in zwei Typen unterteilt werden -gebürsteter Gleichstrommotor und bürstenloser Gleichstrommotor (BLDC); Der bürstenlose Miniatur-DC-Motor ist ein üblicher Mikro-DC-Getriebemotor, der einen bürstenlosen DC-Motor und einen Satz Zahnräder verwendet. Der BLDC-Motor ist ein typisches mechatronisches Produkt. Der bürstenlose Motor bezeichnet den Motor ohne Bürste und Kommutator (oder Schleifring), auch bekannt als kommutatorloser Gleichstrommotor. Ein bürstenloser Miniatur-DC-Getriebemotor verwendet normalerweise einen Permanentmagneten als Außenläufer. Bei Bürsten-Gleichstrom-Getriebemotoren befinden sich die Wicklungen auf dem Rotor. Anders sieht es jedoch beim bürstenlosen Motor aus; bei bürstenlosen Motoren befinden sich die Wicklungen auf dem Stator. Darüber hinaus verwendet es drei Phasen von Antriebsspulen und einen speziellen Sensor, der die Rotorposition verfolgt. Nach dem Verfolgen der Positionsänderung des Rotors kommutiert der Positionssensor den Strom der Statorwicklung in einer bestimmten Reihenfolge (d.h. Erfassen der Position des Rotorpols relativ zur Statorwicklung und Erzeugen eines Positionserfassungssignals an einer bestimmten Position, von der Signalumwandlungsschaltung verarbeitet, um die Leistungsschalterschaltung zu steuern). Bürstenlose Mikro-DC-Getriebemotoren haben verschiedene Anwendungen wie Automobile, Werkzeuge, Smart Homes, elektronische Produkte, Industrieroboter, intelligente Roboter, Logistikgeräte, medizinische Geräte, industrielle Steuerung, Automatisierung und Luft- und Raumfahrt.
3. Mikro-Planetengetriebemotor
Im Gegensatz zu den beiden vorherigen Arten von Getriebemotoren, die nach dem Motor kategorisiert werden, wird der Mikroplanetengetriebemotor durch das vom Getriebemotor übernommene Getriebe unterteilt. Wie in der vorherigen Passage eingeführt, besteht ein Getriebemotor typischerweise aus Zahnrädern, die als Getriebe/Getriebeköpfe bezeichnet werden, und einem Motor, der verwendet wird, um Drehzahl und Drehmoment zu ändern. Das heißt, ein Mikroplanetengetriebemotor bezeichnet einen Motor mit einem Planetengetriebe/Planetengetriebekopf. Planetengetriebe bestehen typischerweise aus drei Teilen – Sonnenrad, Planetenräder und Hohlrad. Das Sonnenrad ist normalerweise in der Mitte platziert, während Planetenräder um das Sonnenrad kreisen und Drehmoment aufnehmen. Beim Hohlrad kämmt das äußere Hohlrad (siehe Gehäuse unten) mit Planetenrädern. Planetengetriebemotoren werden häufig verwendet, um auf engstem Raum die Drehzahl zu verringern und das Drehmoment stark zu erhöhen.
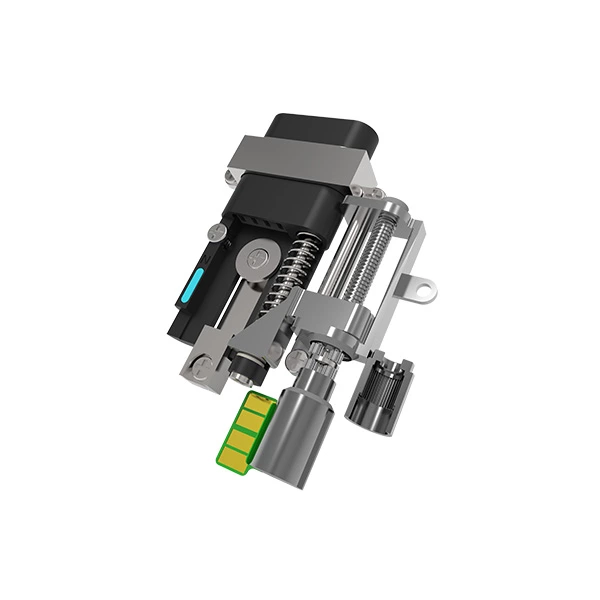
4. Mikro-Getriebeschrittmotor
Mikro-Getriebeschrittmotor bezeichnet normalerweise einen Schrittmotor mit einem Getriebe oder Getriebeköpfen. Während sich der bürstenbehaftete Gleichstrommotor weiter dreht, wenn er an eine Gleichstromquelle angeschlossen ist, ist der Schrittmotor mit Getriebe nicht das Richtige; er wandelt den Eingangsimpuls in ein genau definiertes Inkrement in der Wellenposition um. Die Welle wird bei jedem Impuls mit einem festen Winkel bewegt, dh bei jedem Impulseingang bewegt sich der Rotator um einen Schritt oder dreht sich um einen festen Winkel. Die Drehzahl ist proportional zur Pulsfrequenz. So können Sie die Drehzahl durch Ändern der Eingangsimpulsfrequenz steuern und eine präzise Positionierung realisieren. Das Hinzufügen eines Getriebes zu einem Schrittmotorsystem kann die Motorleistung verbessern, indem das Trägheitsverhältnis der Last zum Motor verringert, das Lastdrehmoment erhöht und die Motorschwingung verringert wird. Da der Mikrogetriebemotor immer breitere Anwendungen findet, sollten Parameter wie Drehmoment, Durchmesser, Spannung und Drehzahl besser angepasst werden. ZHAOWEI bietet als Hersteller von Mikroantriebssystemen eine Reihe kundenspezifischer Übertragungssysteme an, um Ihre spezifischen Anforderungen zu erfüllen.