Ein Robotergreifer bezeichnet ein automatisches Bediengerät, das die Hand und den Arm einiger Aktionsfunktionen nachahmen kann, um feste Prozeduren zu greifen, Gegenstände zu tragen oder Werkzeuge zu handhaben. Der Robotergreifer ist der früheste Industrieroboter und auch der früheste moderne Roboter, der schwere Handarbeit ersetzen kann, um eine Mechanisierung und Automatisierung der Produktion zu erreichen und in einer schädlichen Umgebung zum Schutz der persönlichen Sicherheit zu arbeiten. Der Robotergreifer besteht hauptsächlich aus zwei Teilen, dem Arm und dem Roboterendeffektor. Der Arm verwendet eine Gelenkbewegung, um den Endeffektor anzutreiben, um die voreingestellte Position für die voreingestellte Operation zu erreichen.
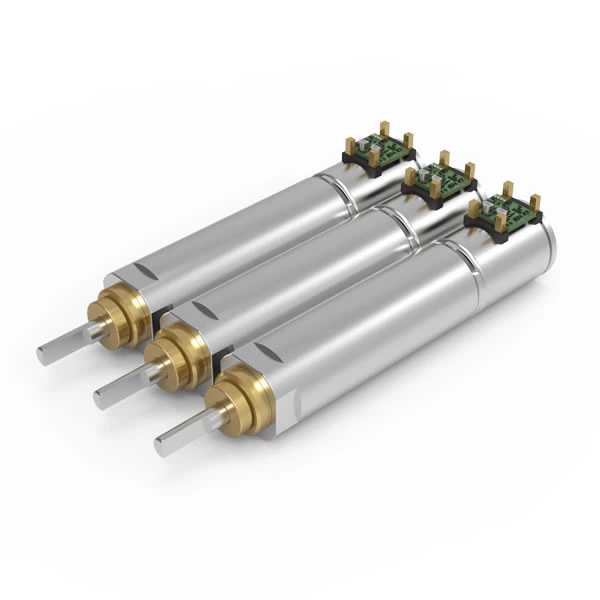
Der DC-Getriebemotor für den Robotergreifer ist ein Mikrogetriebe-Getriebemotor mit geringer Leistung, dessen Hauptgetriebestruktur aus einem Antriebsmotor (Mikromotor) und einem Planetengetriebe (Untersetzungsgetriebe), kurz für „Robotergreifermotor“, zusammengesetzt ist. Es wird auf das Übertragungsmodul des Roboterarms und Greifers aufgebracht. Der Antriebsmotor kann einen Gleichstrommotor, einen Bürstenmotor, einen BLDC-Motor, einen Servomotor, einen Schrittmotor, einen kernlosen Motor und einen Mikromotor als Antriebsquelle verwenden, während das Mikrogetriebe ein Planetengetriebe, ein Zylindergetriebe und ein Schneckengetriebe als Untersetzungsgetriebe verwenden kann. Die technischen Parameter werden oft an die Entwicklungen angepasst, darunter Abtriebsleistung, Übersetzung, Abtriebsdrehmoment, Spannung, Art des Antriebsmotors, Getriebestruktur, Getriebegeräusch und Getriebepräzision.
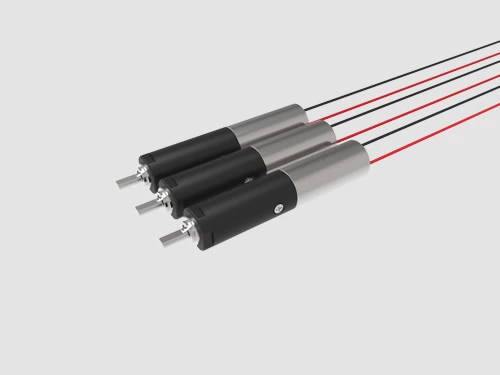
ZHAOWEI Machinery & Electronics Co., Ltd. bietet eine Reihe von kundenspezifischen Entwicklungsdienstleistungen an. Die kundenspezifischen technischen Parameter der von ZHAOWEI bereitgestellten Mikroroboter-Getriebemotoren sind wie folgt:
Durchmesser: 3,4mm bis 38 mm
Spannung: 3V–24V
Ausgangsleistung: 0,01–40W
Ausgangsdrehzahl: 5 bis 2000 U/min
Untersetzungsverhältnis: 5–1500
Abtriebsdrehmoment: 1,0 gf.cm–50kgf.cm
Parameter von Mikrogetriebemotoren für Robotergreifer:
| Material | Metall |
|---|---|
| Außendurchmesser | 22mm |
| Betriebstemperaturbereich | -30℃~+100℃ |
| Drehrichtung | im Uhrzeigersinn und gegen den Uhrzeigersinn |
| Getriebespiel | ≤2° |
| Spannung | 3V~24V |
| Lager | Sinterlager/Wälzlager |
| Eingangsdrehzahl | ≤15000rpm |
| Axialspiel | ≤0,1mm/≤0,1mm |
| Current | 300mA max |
| Motors | Schrittmotor, Eisenlosermotor, Bürstenloser Gleichstrommotor |
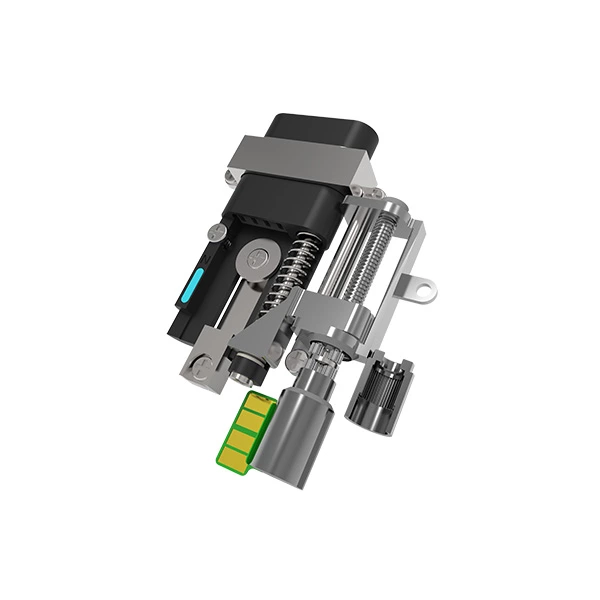
Projektname: Getriebe für Robotergelenke
Projekthintergrund: Ein DC-Getriebemotor wird verwendet, um die Kommunikation und schnelle Reaktion auf den Antrieb der Robotergelenke zu vermitteln, was ein größeres Leistungsgewichtsverhältnis und ein größeres Drehmoment-Trägheitsverhältnis, ein höheres Anlaufdrehmoment, eine geringe Trägheit und einen weiten und sanft regulierbaren Geschwindigkeitsbereich. Insbesondere sollte der Roboter-Endeffektor (Greifer) den Gelenkmotor mit kompakter Größe, geringem Gewicht und großer kurzzeitiger Überlastfähigkeit übernehmen.
Projektbeschreibung: Basierend auf der Entwicklung und Erforschung abriebfester Materialtechnologie, Verarbeitungsoptimierungstechniken, Schmiertechnologie, Verpackungstechnik, Lebensdauertesttechnologie und Übertragungsmechanismus entwickelt und fertigt ZHAOWEI Mikroroboter-Gelenkgetriebe, um die Leistung des intelligenten Roboters zu verbessern, einschließlich Wahrnehmung und Identifikation, Mechanismus und Übertragung, Kontrolle und Interaktion. Die gesamte Palette der Präzisionsroboter verwendet einen Getriebemotor mit Planetengetriebe, dessen Parameter angepasst werden können (Durchmesser: 3,438mm, Leistung: 0,0140W, Abtriebsdrehzahl: 52000rmp, Übersetzung: 51500, Ausgangsdrehmoment: 1,050kgf.cm).