Intelligente Roboter verfügen über eine Vielzahl von internen und externen Rezeptoren, die ihnen Sehen, Hören, Fühlen und Riechen ermöglichen. Darüber hinaus verfügen sie über Effektoren, die es ihnen ermöglichen, auf ihre Umgebung zu reagieren. Der Effektor wird normalerweise als "Muskel" oder selbstschrittender Motor angesehen, der Bewegungen von Händen, Füßen, Nase und Tentakeln verursacht. Mit anderen Worten muss ein intelligenter Roboter mindestens drei Elemente habne: sensorische Elemente, Reaktionselemente und Denkelemente.
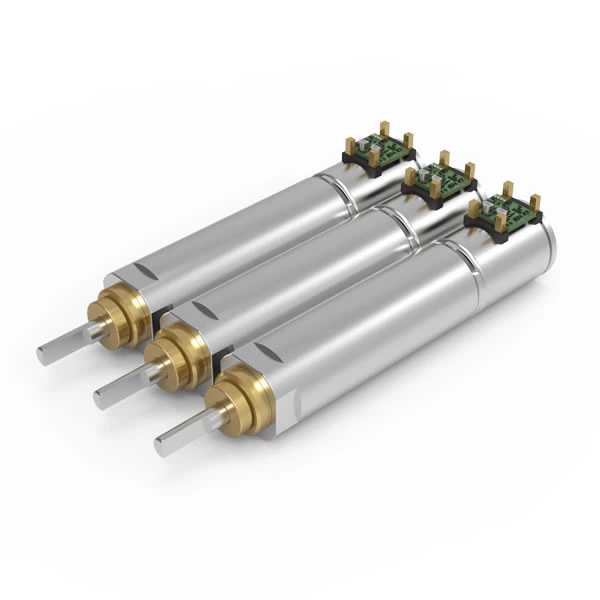
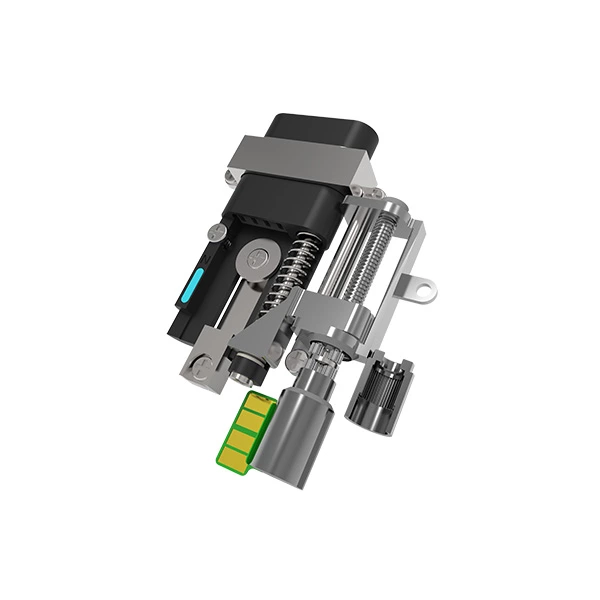
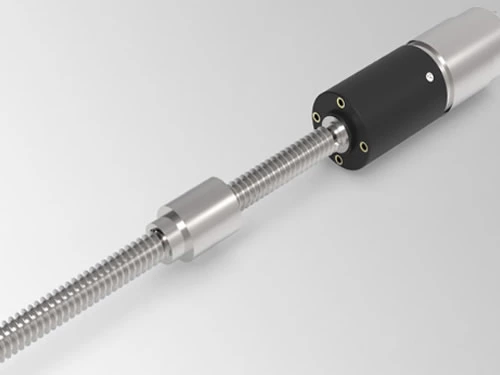
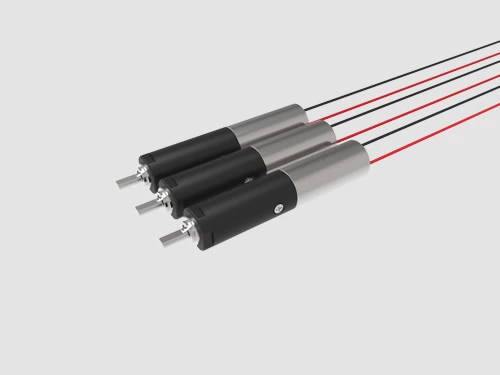
Der Mikroroboter-Servomotor ist ein Mikrogetriebemotor mit geringer Leistung, der an intelligenten Robotergetriebesystemen verwendet werden kann. Die Hauptübertragungsstruktur besteht aus einem Antriebsmotor und einem Getriebe (Untersetzungsgetriebe). Ein Bürstengleichstrommotor, ein BLDC-Motor, ein eisenloser Motor, ein Schrittmotor oder ein Servomotor können als die Antriebsquelle für den Antriebsmotor verwendet werden. Ein Planetengetriebe, ein Zylindergetriebe, ein Normalgetriebe oder ein Schneckengetriebe können als Untersetzungsgetriebe verwendet werden. Verschiedene Getriebemotoren können auf verschiedenen Arten von Mikrorobotern verwendet werden. Die Parameteranpassung umfasst Ausgangsleistung, Spannung, Untersetzungsverhältnis, Abtriebsdrehmoment, Ausgangsdrehzahl, Rauschen und Übertragungsgenauigkeit.
ZHAOWEI Machinery & Electronics Co., Ltd bietet Forschung und Entwicklung, Konstruktion und Herstellung von Mikropräzisions-Hubgetriebemotoren. Die von ZHAOWEI entwickelten kundenspezifischen technischen Parameter sind wie folgt:
Durchmesser: 3,4mm bis 38 mm
Spannung: 3V–24V
Ausgangsleistung: 0,01–40W
Ausgangsdrehzahl: 5 bis 2000 U/min
Untersetzungsverhältnis: 5–1500
Abtriebsdrehmoment: 1,0 gf.cm–50kgf.cm
Parameter des Getriebemotors für Mikroroboter:
| Material | Metall |
|---|---|
| Außendurchmesser | 28mm |
| Betriebstemperaturbereich | -20℃~+85℃ |
| Drehrichtung | cw&ccw |
| Getriebespiel | ≤3° |
| Spannung | 3V~24V |
| Lager | Porous bearing/Rolling bearing |
| Eingangsdrehzahl | ≤15000rpm |
| Axialspiel | ≤0,1mm/≤0,1mm |
| Current | 300mA max |
| Motors | Schrittmotor, Gleichstrom-Bürstenmotor, Bürstenloser Gleichstrommotor |
Individualisierung
Projektname: Getriebemotor für Radroboter
Projektbeschreibung: Intelligente Roboter können nach vorprogrammierten Formeln oder Richtlinien handeln, die durch die KI-Technologie erstellt wurden. Ausgereifte intelligente Roboter können manuelle Arbeit ersetzen, einschließlich Produktion, Bau oder risikoreiche Arbeit. Die Roboter können je nach Aktion in Radtyp, Beintyp, Raupentyp, Schlangentyp oder Verbundtyp unterteilt werden. Mobile Roboter auf Rädern machen einen relativ großen Anteil der autonomen mobilen Roboter aus. Sie bewegen sich schnell und sind einfach zu steuern und werden häufig in automatischen Palettier-Produktionslinien und unbemannten Fahrzeugen verwendet.
Technische Schwierigkeiten: 1. Der mobile Roboter auf Rädern haben eine schlechte Wendefähigkeit. 2. Der mobile Roboter mit Rädern hat eine schlechte Steigfähigkeit, was die Verwendung dieses DC-motorisierten Roboters begrenzt.
Leistung: Der Antriebsteil des mobilen Roboters auf Rädern verwendet einen Gleichstrommotor und ein 38-mm-Planetengetriebe, die antisymmetrisch montiert sind. Diese Methode ermöglicht es, den Radsatz koaxial zu machen und eine größere Leistung zu geben (die Größe und Leistung des Motors sind im Allgemeinen in einem bestimmten Proportional). Dies reduziert den Kraftpunkt auf der Abtriebswelle des Untersetzungsgetriebes, verkürzt den Radstand erheblich und spart Platz, wodurch der Roboter kompakt wird.